Can шина принцип работы
Содержание:
- CAN-адаптеры персональных компьютеров
- Расширенный кадр CAN
- Вариант сопряжения с любой сигналкой
- Что такое CAN-шина
- Стандарты
- Data transmission
- VW Transport Protocol 2.0
- Что такое 2CAN 2LIN?
- Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
- Bit timing
- резервное копирование данных
- Необходимость последовательного соединения в автомобилях
- Характеристики протокола CANПреимущества CAN
CAN-адаптеры персональных компьютеров
В настоящее время в России автору известно два производителя адаптеров сети CAN, которые предлагают их на рынке: фирма «Элкус» из Санкт-Петербурга (www.elcus.ru) и компания «Марафон» из Москвы (can.marathon.ru). Это адаптеры в формате ISA-8, ISA-16, microPC (фактически ISA-8), PC-104 (фактически ISA-16), PCI и VME. Есть и другие российские компании, которые разработали адаптеры сети CAN для промышленных и офисных компьютеров для внутреннего применения.
Архитектуре CAN-адаптеров будет посвящена одна из следующих статей цикла по CAN-тематике, поэтому здесь мы кратко остановимся на функциональных возможностях адаптеров с точки зрения начального освоения сети CAN.
Адаптеры для CAN-сети можно разделить на два типа: устанавливаемые внутрь ПК и подключаемые к внешним интерфейсам ПК. К адаптерам первого типа относятся адаптеры в формате ISA и PCI. К адаптерам второго типа — подключаемые к интерфейсам LPT, RS-232 и USB. Адаптеры для ПК делятся на активные и пассивные. Активные адаптеры характеризуются наличием встроенного микроконтроллера, обеспечивающего предварительную обработку пакетов, поступающих из сети CAN и в сеть CAN из ПК. В комплект поставки входит специализированное программное обеспечение (firmware) в исходных кодах для загрузки в микроконтроллер, встроенный в CAN-адаптер. Пассивные адаптеры представляют собой устройства, преобразующие шину однокристального CAN-контроллера в шину ПК и отображающие внутреннюю память контроллера на область памяти ПК. В этом случае алгоритмы приема и передачи кадров, а также обработки ошибок реализуются пользовательской программой, работающей на ПК.
Для первоначального ознакомления с CAN и создания прототипов устройств рекомендуется использовать пассивные CAN-адаптеры, как более простые в освоении и «прозрачные» для работы с CAN-сетью. Нет необходимости создавать программное обеспечение для микроконтроллера, встроенного в активный CAN-адаптер. Пассивные адаптеры обычно загружают центральный процессор больше, чем активные адаптеры. Это связано с тем, что каждый пришедший по сети CAN пакет должен быть принят и обработан. Производительность современных ПК достаточна для того, чтобы обрабатывать данные, поступающие по сети CAN даже с максимальной скоростью, не превышающей для сети CAN 1 Мбит/сек. Прикладное программное обеспечение и особенно драйвер для адаптера CAN-сети должны быть в этом случае написаны особенно аккуратно, чтобы обеспечивать отсутствие потерянных пакетов при приеме из CAN-сети.
Отдельное место на рынке занимают адаптеры, подключаемые к внешним интерфейсам ПК. Эти адаптеры вряд ли могут быть применены в условиях цеха или полевых условиях. Однако для применения в лабораторных стендах, для тестирования и проектирования CAN-устройств они являются достаточно удобными. Наиболее перспективным является использование адаптеров сети CAN, подключаемых к интерфейсу USB. Шина USB до сих пор не устоялась (по сравнению с внутренними шинами ПК, такими как ISA и PCI) и находится в состоянии непрерывного развития. Это может привести в будущем к проблеме аппаратной и программной совместимости адаптеров USB-CAN, приобретенных сегодня. К сожалению, сегодня на российском рынке можно приобрести адаптеры CAN на USB только импортного производства — фирмы Sys Tec Electronics и IXXAT.
Рассмотрим один из примеров, как ПК с установленным адаптером CAN-сети может быть использован для проектирования сложной распределенной системы управления.
Расширенный кадр CAN
Расширенный кадр сообщения CAN использует 29-битный идентификатор вместе с несколькими дополнительными битами.

Расширенное сообщение имеет заменяющий бит удаленного запроса (SRR) после 11-битного идентификатора, который действует как заполнитель для сохранения той же структуры, что и стандартный CAN. На этот раз расширение идентификатора (IDE) должно быть рецессивным, что указывает на то, что за ним следует расширенный идентификатор. Бит RTR находится после 18-битного идентификатора, за ним следует второй резервный бит r1. Остальная часть сообщения остается прежней.
Вариант сопряжения с любой сигналкой
Ясно, что большинство проводов модуля подключают к автосигнализации, точнее, к ее сигнальным выходам и входам. Выше рассматривалось, как задействовать выходы ЦЗ либо блокировки. То есть, будем считать, что шесть клемм модуля уже задействованы. Речь идет о следующих клеммах: питание, масса, соединение с шиной (провода 2 и 11), а также 17-й и 18-й контакты разъема. О подключении других контактов рассказывается дальше.
Рекомендуем: Пропуски зажигания – разбираемся, почему троит двигатель?
Назначение входов модуля
Ниже приведена базовая схема подключения. Здесь указано назначение клемм, заданное «по умолчанию»:
CAN F5, схема монтажа
Справа перечислены выходы модуля, а слева – его входы. Концевик тормоза к входу 7 чаще всего не подключают – сигнал о нажатии педали присутствует на шине.
Рассмотрим функции всех входов:
- Шнур 9 – сервисная кнопка (когда зажигание включено), кнопка временного отключения опции «комфорт» (при выключенном зажигании);
- Если включено двухшаговое отпирание (опция 15), то с автосигнализации на вход 17 подается «второй отпирающий сигнал»;
- Провод 16 подключают к одному выходу – на нем появляется напряжение, когда задействуется световая сигнализация;
- Назначение остальных проводов (7, 8 и 18) можно понять из схемы.
Вообще же на схеме, если говорить о входах 17 и 18, указан один вариант подключения: сигнализация управляет состоянием модуля при помощи импульсов. Дело в том, что именно такой метод управления используется по умолчанию. Но поменяв значение настраиваемой опции 14, можно переключиться к другому варианту («статусное» управление). Именно о нем речь шла в пункте 2 – не путайте два разных метода!
Выходы модуля и схемы соединений
Теперь будем говорить о подключении выходов модуля. Чаще их соединяют с входами сигнализации напрямую. Но иногда нужна дополнительная коммутация, что реализуют при помощи реле:
CAN F5 и Chevrolet Captiva
Такое подключение, как показано здесь, позволит имитировать одно событие: дверь водителя всегда открывается после завершения автозапуска.
Известно, что конструкторы любой автосигнализации предусматривают два варианта монтажа: первый предназначен для машин с АКП, второй – для авто с «механикой». В первом случае сигналка контролирует педаль тормоза, во втором – ручной тормоз. Выполняя монтаж, подключайте только желто-белый, либо, наоборот, оранжево-черный шнур модуля. На большее не рассчитана сама сигнализация. Нужны подробности – откройте штатное руководство.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Стандарты
- ISO 11898-1: 2015 Транспорт дорожный. Сеть контроллеров. Часть 1. Уровень звена данных и физическая сигнализация.
- ISO 11898-2: 2016 Транспорт дорожный. Сеть контроллеров. Часть 2: Устройство доступа к высокоскоростной среде.
- ISO 11898-3: 2006 Транспорт дорожный. Сеть контроллеров. Часть 3: Низкоскоростной, отказоустойчивый, зависимый от среды интерфейс.
- ISO 11898-4: 2004 Транспорт дорожный. Сеть контроллеров. Часть 4. Связь с синхронизацией по времени.
- ISO 11898-5: 2007 Транспорт дорожный. Сеть контроллера. Часть 5: Высокоскоростной средний блок доступа с режимом пониженного энергопотребления.
- ISO 11898-6: 2013 Транспорт дорожный — Сеть контроллеров — Часть 6: Устройство доступа к высокоскоростной среде с функцией выборочного пробуждения
- SAE J2284-1: 2016 Высокоскоростная CAN для транспортных средств со скоростью 125 кбит / с
- SAE J2284-2: 2016 Высокоскоростная CAN для транспортных средств со скоростью 250 кбит / с
- SAE J2284-3: 2016 Высокоскоростная CAN для транспортных средств со скоростью 500 кбит / с
- SAE J2284-4: 2016 Высокоскоростная CAN для транспортных средств со скоростью 500 кбит / с с данными CAN FD со скоростью 2 Мбит / с
- SAE J2284-5: 2016 Высокоскоростная CAN для транспортных средств со скоростью 500 кбит / с с данными CAN FD со скоростью 5 Мбит / с
Data transmission
CAN features an automatic arbitration-free transmission. A CAN message that is transmitted with highest priority will succeed, and the node transmitting the lower priority message will sense this and back off and wait.
This is achieved by CAN transmitting data through a binary model of «dominant» bits and «recessive» bits where dominant is a logical 0 and recessive is a logical 1. This means open collector, or wired or physical implementation of the bus (but since dominant is 0 this is sometimes referred to as wired and). If one node transmits a dominant bit and another node transmits a recessive bit then the dominant bit «wins» (a logical AND between the two).
|
|
|
So, if a recessive bit is being transmitted while a dominant bit is sent, the dominant bit is displayed, evidence of a collision. (All other collisions are invisible.) A dominant bit is asserted by creating a voltage across the wires while a recessive bit is simply not asserted on the bus. If any node sets a voltage difference, all nodes will see it. Thus there is no delay to the higher priority messages, and the node transmitting the lower priority message automatically attempts to re-transmit 6 bit clocks after the end of the dominant message.
When used with a differential bus, a carrier sense multiple access/bitwise arbitration (CSMA/BA) scheme is often implemented: if two or more devices start transmitting at the same time, there is a priority based arbitration scheme to decide which one will be granted permission to continue transmitting. The CAN solution to this is prioritized arbitration (and for the dominant message delay free), making CAN very suitable for real time prioritised communications systems.
During arbitration, each transmitting node monitors the bus state and compares the received bit with the transmitted bit. If a dominant bit is received when a recessive bit is transmitted then the node stops transmitting (i.e., it lost arbitration). Arbitration is performed during the transmission of the identifier field. Each node starting to transmit at the same time sends an id. with dominant as binary 0, starting from the high bit. As soon as their id. is a larger number (lower priority) they will be sending 1 (recessive) and see 0 (dominant), so they back off. At the end of id. transmission, all nodes but one have backed off, and the highest priority message gets through unimpeded.
For example, consider an 11-bit id. CAN network, with two nodes with id’s of 15 (binary representation, 00000001111) and 16 (binary representation, 00000010000). If these two nodes transmit at the same time, each will transmit the first 6 zeros of their id. with no arbitration decision being made. When the 7th bit is transmitted, the node with the id. of 16 transmit a 1 (recessive) for its id., and the node with the id. of 15 transmits a 0 (dominant) for its id.. When this happens, the node with the id. of 16 will realize that it lost its arbitration, and allow the node with id. of 15 to continue its transmission. This ensures that the node with the lower bit value will always win the arbitration. The id. with the smaller number will win the right to use.
VW Transport Protocol 2.0
Volkswagen Transport Protocol 2.0 используется в качестве транспортного уровня, а данные передаются в формате KWP2000. Keyword Protocol 2000 — это протокол для бортовой диагностики автомобиля стандартизированный как ISO 14230. Прикладной уровень описан в стандарте ISO 14230-3. Более подробно в википедии.
Т.к. KWP2000 использует сообщения переменной длины, а CAN шина позволяет передавать сообщения не больше 8 байт, то VW TP 2.0 разбивает длинное сообщение KWP2000 на части при отправке по CAN шине и собирает заново при получении.
Диагностические данные от двигателя по протоколу KWP2000 (Skoda Octavia A5)
ЭБУ двигателя моей машины использует протокол VW TP 2.0, поэтому мне пришлось изучить его. Видимо Volkswagen разрабатывала транспортный протокол не только для работы по надежной CAN шине, но и для менее надежных линий связи, иначе нет объяснения для чего требуется такая избыточная проверка целостности данных. Главным источником информации по VW TP 2.0 является сайт https://jazdw.net/tp20.
Разбор протокола VW TP 2.0 на примере подключения к первой группе двигателя:
|
200 01 C0 00 10 00 03 01 |
Настраиваем канал с двигателем. Байт 0: 0x01 — двигатель, 0x02 — трансмиссия. Байт 5,4: 0x300 — адрес источника |
|
201 00 D0 00 03 40 07 01 |
Получили положительный ответ. Байт 5,4: 0x740 — к двигателю обращаемся по этому адресу |
|
740 A0 0F 8A FF 32 FF |
Настраиваем ЭБУ на отправку сразу 16 пакетов и выставляем временные параметры |
|
300 A1 0F 8A FF 4A FF |
Получили положительный ответ |
|
740 10 00 02 10 89 |
Отправляем команду KWP2000 startDiagnosticSession. Байт 0: 0x10 = 0b0001 — последняя строка данных + 0x0 счетчик отправляемых пакетов 0 (0x0 — 0xF) |
|
300 B1 |
Получили первый ACK |
|
300 10 00 02 50 89 |
Получили положительный ответ. Байт 0: 0x10 — cчетчик принимаемых пакетов 0 |
|
740 B1 |
Мы отправили первый ACK, что получили ответ |
|
740 11 00 02 21 01 |
Делаем запрос. Байт 0: 0x11 — счетчик отправляемых пакетов 1. Байт 3: 0x21 — запрос параметров. Байт 4: 0x01 — из группы 1 |
|
300 B2 |
Получили второй ACK |
|
300 22 00 1A 61 01 01 C8 13 |
Байт 0: 0x22 — 0b0010 (не последняя строка данных) + 0x02 (cчетчик принимаемых пакетов 2). Байт 1,2: 0x00 0x1A длина 26 байт. Байт 3,4: 0x61 0x01 — положительный ответ на команду запроса параметров 0x21+0x40=0x61 из 0x1 группы. Байт 5: 0х01 — Запрос RPM (соответсвует протоколу KW1281). Байт 6,7: (0xC8 * 0x13)/5 = 760 RPM (формула соответствует протоколу KW1281) |
|
300 23 05 0A 99 14 32 86 10 |
Байт 1: 0x05 — запрос ОЖ. Байт 2,3: (0x0A * 0x99)/26 = 57.0 C. Байт 4: 0x14 = запрос лямбда контроль %. Байт 5,6: 0x32*0x86; Байт 7: 0х10 — двоичная настройка |
|
300 24 FF BE 25 00 00 25 00 |
0x25 0x00 x00 — Заполнитель, до 8 параметров |
|
300 15 00 25 00 00 25 00 00 |
Байт 0: 0x15 — 0b0001 (последняя строка данных) + 0x5 (счетчик принимаемых пакетов 5) |
|
740 B5 |
Отправляем ACK. Прибывляем к нашему предыдущему ACK количество полученных пакетов 0xB1 + 0x4 = 0xB5 |
|
300 A3 |
Запрос KeepAlive, что мы еще на связи |
|
740 A1 0F 8A FF 4A FF |
Ответ KeepAlive |
|
740 A8 |
Мы разрываем связь |
|
300 A8 |
ЭБУ в ответ тоже разрывает связь |
Во второй версии мобильного приложения VAG Virtual Cockpit появилась возможность диагностировать двигатель и трансмиссию по протоколу VW TP 2.0.
VAG Virtual Cockpit — экран с данными от двигателя по протоколу VW TP 2.0
Что такое 2CAN 2LIN?
Предлагаем поэтапно разобрать самые важные моменты.
Что это за комплектация такая, 2CAN 2LIN
Каждая модель сигнализации Старлайн имеет несколько вариаций, различающихся между собой наличием дополнительных модулей. Например, у Старлайн а93, есть версии ECO, GSM, CAN+ LIN, а также 2CAN+ 2LIN.
ECO – самая простая модификация, с минимальным набором базовых функций. GSM оснащена встроенным модулем для SIM карты. Если на упаковке охранной системы есть обозначение CAN+ LIN или 2CAN+ 2LIN, значит в ее комплектацию входит дополнительный блок для подключения через цифровой кабель.
Список машин, которые поддерживают модуль 2CAN 2LIN, можно посмотреть тут: Сайт Старлайн
Что такое CAN LIN шины?
Итак, теперь вы знаете, что 2can 2lin в сигнализциях Starline – это, по сути, такой способ подключения. Рассмотрим, что он из себя представляет.
CAN – расшифровывается, как Controller Area Network. Из перевода выходит, это некая цифровая сеть из датчиков, контроллеров и исполнительных устройств. Связь между ними обеспечивает КАН шина (кабель), по которой и происходит общение между разными электронными блоками
Can шина – имеет ли она что-то общее с обычными шинами и для чего нужна
ВНИМАНИЕ! Найден совершенно простой способ сократить расход топлива! Не верите? Автомеханик с 15-летним стажем тоже не верил, пока не попробовал. А теперь он экономит на бензине 35 000 рублей в год! Читать дальше». Услышав такое определение, как «CAN шина», неопытный водитель подумает что это ещё один вид автомобильной резины
Но на самом деле, к обычным шинам это устройство не имеет никакого отношения. Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной
Услышав такое определение, как «CAN шина», неопытный водитель подумает что это ещё один вид автомобильной резины. Но на самом деле, к обычным шинам это устройство не имеет никакого отношения. Это устройство создавалось для того, чтобы не было необходимости устанавливать в машине кучу проводов, ведь управление всеми системами машин должно вестись из одного места. Can шина даёт возможность сделать салон автомобиля комфортным для водителя и пассажиров, ведь при её наличии не будет большого количества проводов, позволяет вести управление всеми системами машины и подключать в удобный способ дополнительное оборудование – трекеры, сигнализации, маяки, секретки и другое. В машина старого образца ещё нет такого приспособления, это доставляет много неудобств. Цифровая шина лучше справляется с поставленными на неё задачами, а стандартная система – с кучей проводов, является сложной и неудобной.
Bit timing
Each node in a CAN network has its own clock, and no clock is sent during data transmission. Synchronization is done by dividing each bit of the frame into a number of segments: Synchronization, Propagation, Phase 1 and Phase 2. The Length of each phase segment can be adjusted based on network and node conditions. The sample point falls between Phase Buffer Segment 1 and Phase Buffer Segment 2, which helps facilitate continuous synchronization. Continuous synchronization in turn enables the receiver to be able to properly read the messages.
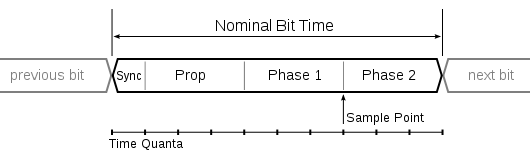
An example CAN Bit Timing with 10 time quanta per bit.
резервное копирование данных
Если получатель обнаруживает состояние ошибки, он отправляет кадр ошибки и, таким образом, предлагает всем участникам отказаться от этого кадра. Если другие участники распознали это состояние ошибки, они, в свою очередь, сразу же после этого отправляют другой кадр ошибки. Это обеспечивает дополнительную функцию безопасности протокола CAN. Во избежание того, чтобы отдельные участники постоянно блокировали транспортировку сообщений из-за ошибочно распознанных состояний ошибок, каждый участник содержит счетчики ошибок. Согласно правилам спецификации, эти счетчики позволяют отключать неисправного абонента от шины на двух этапах рабочего состояния, если он неоднократно обнаруживает ошибки, которые другие абоненты не распознают, или повторно отправляет некорректные кадры. Состояния называются активным при ошибке (нормальным), пассивным при ошибке (участник может отправлять только пассивные, т. Е. Рецессивными, кадрами ошибки) и отключение шины (участник больше не может отправлять).
Передатчик повторяет передачу данных после кадра ошибки. Передатчик также может быть отключен от шины с помощью ранее упомянутых счетчиков ошибок, если передача данных не удалась навсегда. Различные случаи ошибок приводят к разному увеличению счетчика ошибок.
Необходимость последовательного соединения в автомобилях
Это следующая наша переводная статья из цикла посвященного шине CAN, которая еще чуть более подробно раскрывает то, как устроена и функционирует шина КАН. Англоязычный оригинал.
Предыдущую читайте здесь.
Многие автомобили уже имеют большое количество электронных систем управления. Рост автомобильной электроники является результатом отчасти стремления потребителя к большей безопасности и комфорту, а также отчасти требований правительства по улучшению контроля за выбросами и снижению расхода топлива. Управляющие устройства, отвечающие этим требованиям уже используются в течение некоторого времени в области управления двигателем, коробкой передач и дроссельной заслонкой, а также в антиблокировочных системах (ABS) и системе управления ускорением (ASC) .
Сложность функций, реализованных в этих системах, требует обмена данными между ними. В традиционных системах обмен данными осуществляется с помощью выделенных сигнальных линий, но это становится все труднее и дороже, так как функции управления становятся все более сложными. В случае сложных систем управления (таких как Motronic), в частности, количество соединений не может больше увеличиваться.
Кроме того, разрабатывается ряд систем, реализующих функции, охватывающие более одного управляющего устройства. Например, ASC требует взаимодействия системы управления двигателем и управления дросселем (впрыском) для уменьшения крутящего момента при проскальзывании ведущего колеса. Другим примером функций, охватывающих более одного блока управления, является электронное управление коробкой передач, где легкость переключения передач может быть улучшена путем кратковременной регулировки опережения зажигания.
Если мы также рассмотрим будущие разработки, направленные на общую оптимизацию транспортных средств, то необходимо преодолеть ограничения, существующие в связи с обычными устройствами управления. Это можно сделать только путем объединения в сеть компонентов системы с использованием последовательной шины данных. Bosch разработал для этой цели систему «Controller Area Network» (CAN), которая с тех пор была стандартизирована на международном уровне (ISO 11898) и была «отлита в камне (в кремнии)» несколькими производителями полупроводников.
Используя CAN, одноранговые (одноуровневые) станции (контроллеры, датчики и исполнительные механизмы) подключаются через последовательную шину. Сама шина является симметричной или асимметричной двухпроводной цепью, которая может быть экранированной или неэкранированной. Электрические параметры физической передачи также указаны в стандарте ISO 11898. Подходящие чипы драйвера шины доступны от большого ряда производителей
Протокол CAN, соответствующий уровню канала передачи данных в эталонной модели ISO / OSI, удовлетворяет требованиям автомобильных для применения в автомобилях настоящего времени. В отличие от кабельных древовидных структур, сетевой протокол обнаруживает и исправляет ошибки передачи, вызванные электромагнитными помехами. Дополнительными преимуществами такой сети являются простота конфигурирования всей системы и возможность центральной диагностики.
Цель использования CAN в транспортных средствах заключается в том, чтобы любая станция могла взаимодействовать с любым другим, не налагая слишком большую нагрузку на компьютер контроллера.
Характеристики протокола CANПреимущества CAN
Общая тенденция в области автоматизации состоит в замене традиционной централизованной системы управления на распределенное управление путем размещения интеллектуальных датчиков и исполнительных механизмов рядом с управляемым процессом. Это вызвано ростом числа проводов связи, увеличением количества соединений, сложностью диагностики ошибок и проблемами с надежностью. Связь между узлами такой системы осуществляется с помощью полевой шины. CAN — это система связи для многоконтроллерных систем. Рассмотрим более подробно преимущества CAN и причины, по которым CAN приобретает все большее распространение.
Испытанный стандарт
Протокол CAN активно используется уже более 20 лет, что очень важно для таких консервативных областей как железнодорожный транспорт или судостроение. CAN был разработан в 1980 г
фирмой Robert Bosch для автомобильной промышленности. CAN-интерфейс регламентирован международными стандартами ISO 11898 для высокоскоростных и ISO 11519-1 для низкоскоростных приложений.Низкая стоимость определяется хорошим соотношением цена/производительность, также широкой доступностью CAN-контроллеров на рынке.Надежность определяется линейной структурой шины и равноправностью ее узлов, так называемой мультимастерностью (Multi Master Bus), при которой каждый узел CAN может получить доступ к шине. Любое сообщение может быть послано одному или нескольким узлам. Все узлы одновременно считывают с шины одну и ту же информацию, и каждый из них решает, принять данное сообщение или игнорировать его. Одновременный прием очень важен для синхронизации в системах управления. Отказавшие узлы отключаются от обмена по шине.
Высокая помехоустойчивость достигается благодаря подавлению синфазных помех дифференциальным приемопередатчиком, работе встроенных механизмов обнаружения ошибок (одна необнаруженная ошибка за 1000 лет при ежедневной 8-часовой работе сети на скорости 500 Кбит/с), повтору ошибочных сообщений, отключению неисправных узлов от обмена по шине и устойчивости к электромагнитным помехам.
Гибкость достигается за счет простого подключения к шине и отключения от шины CAN-узлов, причем общее число узлов не лимитировано протоколом нижнего уровня. Адресная информация содержится в сообщении и совмещена с его приоритетом, по которому осуществляется арбитраж. В процессе работы возможно изменение приоритета передаваемого сообщения. Следует также отметить возможность программирования частоты и фазы передаваемого сигнала и арбитраж, не разрушающий структуру сообщений при конфликтах. На физическом уровне есть возможность выбора разнотипных линий передачи данных: от дешевой витой пары до оптоволоконной линии связи.
Работа в реальном времени становится возможной благодаря механизмам сетевого взаимодействия (мультимастерность, широковещание, побитовый арбитраж) в сочетании с высокой скоростью передачи данных (до 1 Мбит/с), быстрой реакцией на запрос передачи и изменяемой длиной сообщения от 0 до 8 байт.