Как работает кан шина в автомобиле
Содержание:
- Что такое шина LIN
- Что такое CAN-шина
- Преимущества и недостатки встроенных шин
- Можно ли сделать анализатор своими руками?
- Скорость передачи данных CAN-шины
- Рекомендации владельцу
- Арбитраж и сигналы на шине CAN
- Неисправности
- Can шина автомобиля что это такое
- Вариант сопряжения с любой сигналкой
- Что такое CAN шина и принцип работы
- Расширенный кадр CAN
- Реализации CAN на уровне электрических сигналов
- Принципы работы CAN-шины
- Потенциальные проблемы
Что такое шина LIN
Шина LIN – это простая последовательная однопроводная шина для автомобильных применений и используется в тех случаях когда применение CAN шины – дорого. По шине LIN управляются различные приводы (корректоры фар, заслонки климатической системы, приводы центрального замка), а так же собирается информация с простых датчиков (датчики дождя, света, температуры).
Для изучения шины LIN Вы можете использовать наш адаптер CAN-Hacker 3.0 с дополнительной опцией LIN анализатора. А так же интерфейс CAN-Hacker CH-P
Пример системы управления дверью с шиной LIN и без нее:
Еще пример, в автомобиле Porsche Macan 2015 г. все привода и датчики климатической системы подключены к шине LIN а сам блок климат контроля связан с автомобилем при помощи CAN шины.
Дешевизна LIN обусловлена тем что реализация протокола LIN полностью программная и строится на базе обычного UART (родственник RS232, COM порт). Так же LIN не требует применения точных времязадающих цепей – кварцевых резонаторов и генераторов. Поэтому можно применять дешевые микроконтроллеры.
Скорость передачи данных
Скорость передачи данных на шине LIN стандартная для устройств построенных на базе UART: 2400; 9600; 10400; 19200; 20000 Бод. Это немного но достаточно для передачи данных от датчиков и для управления медленными механизмами.
Электрическая реализация LIN
Электрически интерфейс LIN реализован так же просто. В каждом узле линия шины подтянута к шине питания +12V. Передача осуществляется опусканием уровня шины до уровня массы GND. Микроконтроллер подключается к шине LIN при помощи специальной микросхемы Трансивера, например TJA1021
Подключение LIN трансивера к микроконтроллеру
Архитектура сети LIN
Особенностью шины LIN является то, что в сети присутствует два вида узлов: Master и Slave, Master – ведущий, Slave – подчиненный.
Master может опрашивать Slave о его состоянии, будить его, отправлять ему команды. Обмен информации на шине LIN происходит в формате обмена пакетами, и на первый взгляд может показаться что механизм идентичен шине CAN, это не так. Объясняем почему:
Структура LIN пакета выглядит так:
Frame – Header – заголовок кадра, который отправляется в шину Мастером. Включает в себя ID кадра
Уловите разницу – в шине CAN все узлы передают и ID кадра и данные. В шине LIN – заголовок пакета это задача Мастер-узла.
Поле Frame-Header состоит из полей:
BREAK – Это сигнал шине о том что мастер сейчас будет говорить
Поле синхронизации – это просто байт = 0x55. При его передаче приемники подстраивают свою скорость.
PID – это поле защищенного идентификатора. В дальнейшем будем писать просто – идентификатор.
Идентификатор может принимать значения от 0 до 59 (0x3B в HEX) для пользовательских пакетов. Так же возможно использование специальных служебных пакетов с ID 0x3C, 0x3D, 0x3E и 0x3F. Защищенность идентификатора заключена в следующем:
В структуре байта ID мы видим биты собственно самого идентификатора с ID0 по ID5, а затем идут два контрольных бита P0 и P1, которые рассчитываются так:
P0 = ID0 ⊕ ID1 ⊕ ID2 ⊕ ID4 P1 = ¬ (ID1 ⊕ ID3 ⊕ ID4 ⊕ ID5)
ID = 0x0C PID = 0x4C
Если в PID контрольные биты рассчитаны неверно то пакет не будет обработан принимающей стороной.
В случае если мы будем эмулировать работу какого либо узла Master, предварительно изучив отправляемые им данные при помощи LIN сниффера, то нам не придется задумываться о расчете контрольных битов ID, поскольку в пакетах которые мы видим сниффером все уже посчитано до нас.
После того как Slave принял Header мастера он отвечает полем Frame Response который состоит из байтов данных в количестве от 1 до 8 и байта контрольной суммы.
Обратите внимание на отсутствие поля DLC отвечающего за количество байтов данных как в CAN шине. В шине LIN количество байтов данных определяется на этапе написания ПО контроллера
Поэтому процесс обмена на шине LIN сложнее анализировать при помощи сниффера – приходится вводить специальный алгоритм разделения пакетов, который угадывает сколько байтов данных было в принятом пакете.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Преимущества и недостатки встроенных шин
Как и у каждой системы у CAN-шины есть свои позитивные негативные характеристики. Основные плюсы заключаются в таких факторах:
- за счет высокого быстродействия устройства способны практически мгновенно связываться пакетными данными;
- кабельные установки выдерживают воздействие электромагнитых помех;
- электроника наделена системой контроля с несколькими уровнями, что способствует минимизации возникновения ошибок во время приема/передачи пакетов данных;
- за счет автоматики шина самостоятельно распределяет по CANалам скорость, оказывая позитивное влияние на работу электронных систем в целом;
- производители позаботились о достаточной степени безопасности цифрового интерфейса, поэтому внешние несанкционированные подключения будут мгновенно заблокированы;
- использование в конструкции цифрового интерфейса позволяет без проблем осуществлять монтаж сигнализации либо иных систем безопасности с минимальным взаимодействием с бортовой штатной системой.
Важно знать минусы установки шин:
- определенные модели интерфейсов рассчитаны на лимитированный объем пакетных данных, что является малоприемлемым для современных автомобилей, нашпигованным большим количеством электроники. Если добавлять к шине новых источников данных, то это негативно скажется на нагрузке, а также существенно повысит время отклика оборудования;
- передаваемые данные по каналам связи обладают исключительным назначением. Полезная информация отнимает минимум трафика;
- может случаться отключение стандартизации из-за внедрения протокола повышенного уровня.
Более стабильно работают интерфейсы последних поколений. Предпочтительней выбирать машины с такими шинами.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства
Плата, использующаяся в качестве основы
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.

В угоду ускорения процесса, разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей, с возможностью подключения большего количества приборов. Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две, и т. д. цепи.
Рекомендации владельцу
Перечислим советы и требования, которые не приводят в базовом руководстве:
- После установки системы убедитесь в том, что датчик удара Starline 205 закреплен горизонтально. Есть отзывы, где сказано, что датчик обычно глючит после первого сезона эксплуатации. Совет: используйте 4 точки монтажа, а не 2.
- Для основного пульта лучше купить защитный чехол, чтобы от перепада температур не разряжалась батарея. Других причин нет.
- Чехол для дополнительного пульта (брелока) найти не удастся, да он и не нужен. Штатный элемент питания разряжается медленно.
- Режим Валет предназначен для передачи авто на сервис. Чтобы этот режим задействовать, сервисная кнопка не нужна. Отключить указанный режим без кнопки Valet можно тоже.
Как читатель понял, режим Валет и кнопка Valet никак друг с другом не связаны. В других системах класса Car Alarm все сделано иначе. Иногда для управления указанным режимом используют отдельный выключатель.
Проводя сравнение сигнализаций Starline, редко сравнивают время работы пульта. А зря – батарея «садится» за 2-3 месяца.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
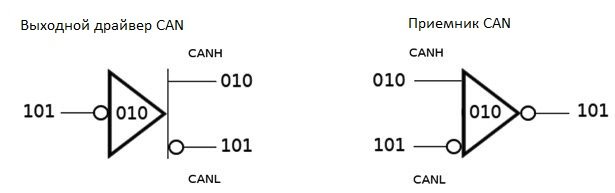
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.
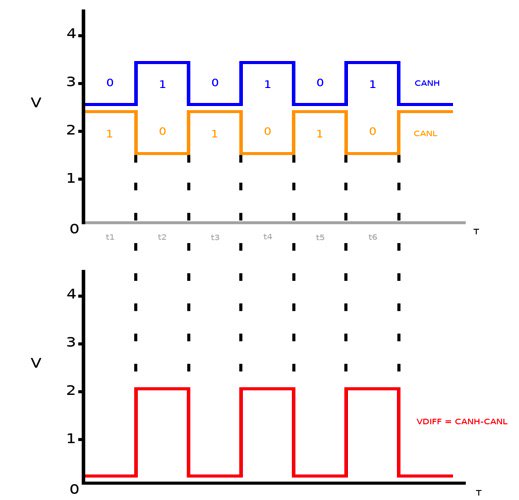
На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.
Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
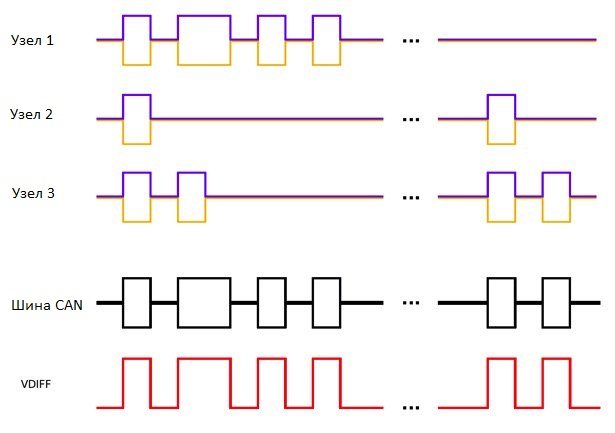
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
Процесс проверки:
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
https://youtube.com/watch?v=kVjWxMY63-4
Can шина автомобиля что это такое
В современных машинах используются электронные блоки управления (ЭБУ, ECU — Electronic Control Unit) для контроля и управления различными системами машины, такими как гидравликой, коробкой передач и двигателем. Аналогично тому, как компьютеры могут быть соединены в одну сеть, блоки управления в машине тоже можно объединить.
Преимущества сетевого соединения:
- Более чувствительная система управления
- Получение более полных и надежных данных
- Обнаружение неисправностей и управление настройками производится средствами программного обеспечения.
Например, ЭБУ двигателя может обмениваться с другими ЭБУ машины по системе сети CAN.
Система CAN: Controller Area Network — сеть контроллеров. CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время получил широкое применение в автомобильной, авиационной, тракторостроительной и других видах промышленности.
Электронная система связи CAN, которая объединяет все блоки управления машиной в сеть с общим кабелем(шиной) и состоящая из одной пары проводов, называется шиной CAN. Закодированные данные посылаются от блоков управления на шину CAN.
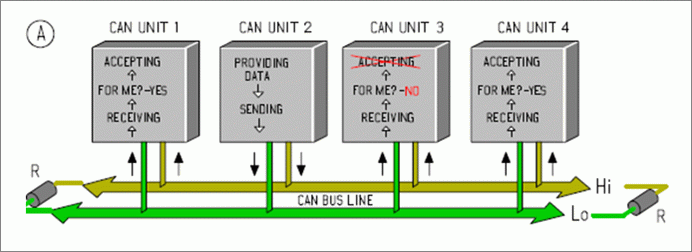
Рисунок — CAN шина из 4-х блоков управления.
Выше показана шина CAN, состоящая из 4-х блоков управления. На концах общего кабеля (шины) устанавливается согласующие сопротивления (терминаторы, резисторы) Обычно сопротивление каждого резистора составляет 120 Ом. Применение согласующих резисторов на концах системы позволяет избежать отражение сигнала в конце линии тем самым обеспечивая нормальную работу всей CAN сети.
Передача сигналов в шине CAN осуществляется посредством двух скрученных между собой проводов (витая пара, Twisted Pair) Применение витой пары проводов, обусловлено дифференциальной передачей данных и высокой защитой такого решения от внешних помех.
В нашем случае блок №2 отправляет один сигнал по двум витым проводам в шину CAN, причем у этого сигнала будет различное напряжение на каждом проводе витой пары. Другие блоки в сети читают сигнал и определяют какому блоку оно предназначено и какую команду нужно выполнить (Блоки №1 и №4)
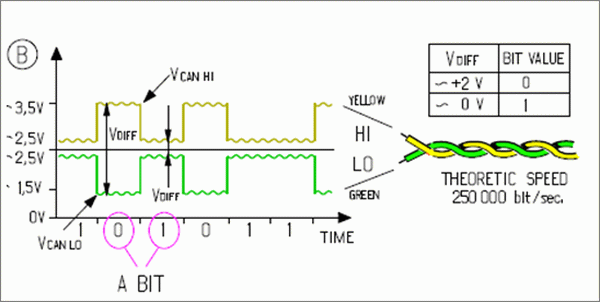
Рисунок — Принцип линии CAN
Так происходит передача сигналов по шине CAN. Сами эти сигналы представляют собой «кадры» (сообщения), которые принимаются всеми элементами сети CAN. Полезная информация в кадре состоит из идентификационного поля (идентификатора) длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификационное поле говрит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами. Также в кадре (сообщении) помимо полезной информации содержится служебная информация. Она представлена полями проверки, полем отзыва и другим полями. В конце кадра содержится «поле конец сообщения»
В шине CAN сообщения от блоков управления должны передаваться в общую шину , то для исключения конфликтов между блоками, каждый узел перед отправкой кадра проверяет сеть на передачу доминантного бита. Устройство передающее доминантный бит считается приоритетным. Таким образом устройство будет дожидаться освобождения линии CAN. С одной стороны такой алгоритм работы повышает быстродействие, но с другой при неправильной работе одного из блоков управления возможна полная «загрузка» CAN шины и невозможность отправки сообщении другими блоками, элементами сети CAN (Линия для них будет всегда занята).
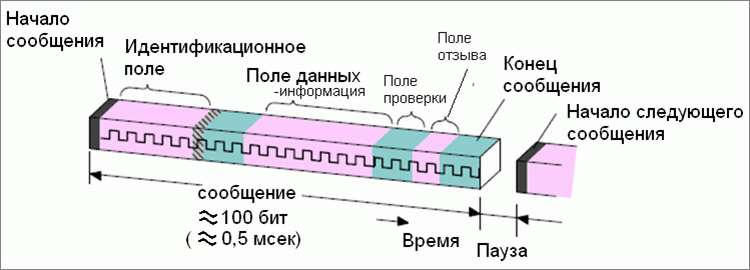
Рисунок —Структура сообщения
Напоследок пример работы:
Переключением кнопки инициируем команду блока управления №1 передачу сообщений в шину CAN. Блок №2 получает сообщение и расшифровав в сообщении что кадр пришел для него с командой включить свет. Подается бортовое напряжение на потребитель.
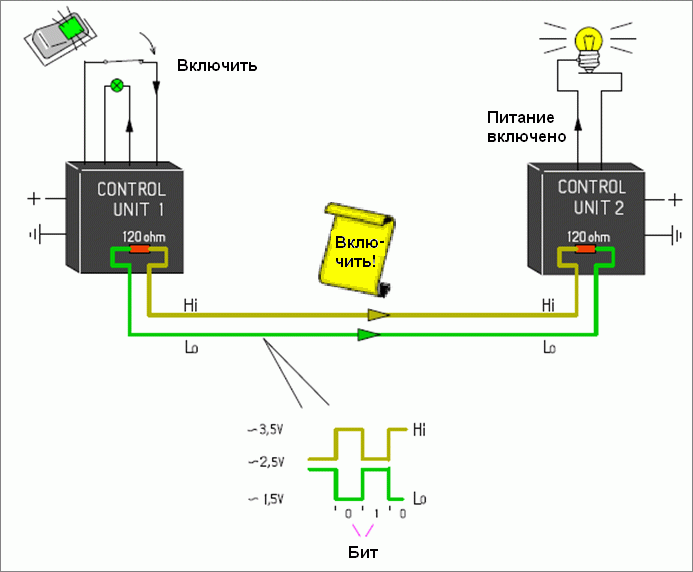
Рисунок — Принцип коммуникации через CAN
Вот такой принцип работы шины CAN без конкретных углублений. Также стоит отметить, что шина CAN может иметь свои особенности, зависящее от области применения и фирмы производителя. В статье я рассказал о наиболее часто встречающейся шине CAN, которую можно встретить в современных грузовых и легковых автомобилях, тракторах и разнообразной спец технике.
1″ :pagination=»pagination» :callback=»loadData» :options=»paginationOptions»>
Статья написана по материалам сайтов: www.ugona.net, voditeliauto.ru, catterbet.com.
Вариант сопряжения с любой сигналкой
Ясно, что большинство проводов модуля подключают к автосигнализации, точнее, к ее сигнальным выходам и входам. Выше рассматривалось, как задействовать выходы ЦЗ либо блокировки. То есть, будем считать, что шесть клемм модуля уже задействованы. Речь идет о следующих клеммах: питание, масса, соединение с шиной (провода 2 и 11), а также 17-й и 18-й контакты разъема. О подключении других контактов рассказывается дальше.
Рекомендуем: Пропуски зажигания – разбираемся, почему троит двигатель?
Назначение входов модуля
Ниже приведена базовая схема подключения. Здесь указано назначение клемм, заданное «по умолчанию»:
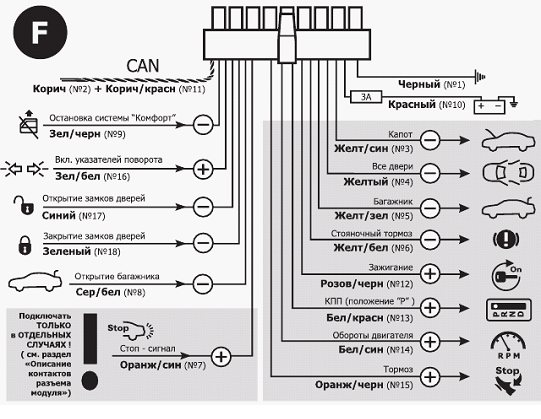
CAN F5, схема монтажа
Справа перечислены выходы модуля, а слева – его входы. Концевик тормоза к входу 7 чаще всего не подключают – сигнал о нажатии педали присутствует на шине.
Рассмотрим функции всех входов:
- Шнур 9 – сервисная кнопка (когда зажигание включено), кнопка временного отключения опции «комфорт» (при выключенном зажигании);
- Если включено двухшаговое отпирание (опция 15), то с автосигнализации на вход 17 подается «второй отпирающий сигнал»;
- Провод 16 подключают к одному выходу – на нем появляется напряжение, когда задействуется световая сигнализация;
- Назначение остальных проводов (7, 8 и 18) можно понять из схемы.
Вообще же на схеме, если говорить о входах 17 и 18, указан один вариант подключения: сигнализация управляет состоянием модуля при помощи импульсов. Дело в том, что именно такой метод управления используется по умолчанию. Но поменяв значение настраиваемой опции 14, можно переключиться к другому варианту («статусное» управление). Именно о нем речь шла в пункте 2 – не путайте два разных метода!
Выходы модуля и схемы соединений
Теперь будем говорить о подключении выходов модуля. Чаще их соединяют с входами сигнализации напрямую. Но иногда нужна дополнительная коммутация, что реализуют при помощи реле:
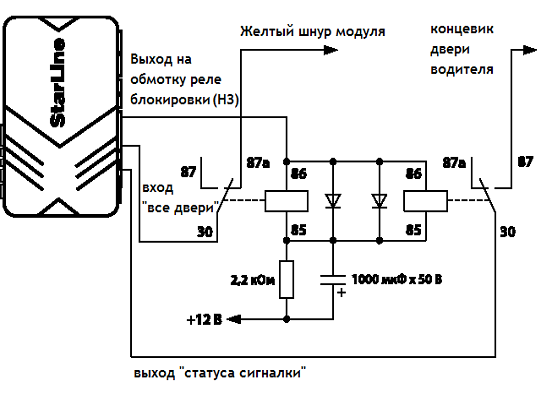
CAN F5 и Chevrolet Captiva
Такое подключение, как показано здесь, позволит имитировать одно событие: дверь водителя всегда открывается после завершения автозапуска.
Известно, что конструкторы любой автосигнализации предусматривают два варианта монтажа: первый предназначен для машин с АКП, второй – для авто с «механикой». В первом случае сигналка контролирует педаль тормоза, во втором – ручной тормоз. Выполняя монтаж, подключайте только желто-белый, либо, наоборот, оранжево-черный шнур модуля. На большее не рассчитана сама сигнализация. Нужны подробности – откройте штатное руководство.
Что такое CAN шина и принцип работы
Автомобильный электронный КАН модуль представляет собой сеть контроллеров, предназначенных для объединения всех управляющих блоков машины в одну сеть. Основная особенность заключается в том, что объединение элементов происходит с использованием одного проводника. Сам цифровой интерфейс на авто включает в себя пару кабелей, именуемых CAN. Информация, которая поступает по каналам от одного блока к другому, передается в зашифрованном виде.
Где находится устройство
Место установки CAN шины зависит от конкретной модели автомобиля, этот момент надо уточнять в сервисном руководстве к машине. Он может располагаться в моторном отсеке или в салоне, под панелью приборов. Подробно на фото показаны примеры расположения КАН интерфейсов.

Функции
Функции, выполняющиеся интерфейсом КАН:
- возможность подключать к электросети транспортного средства и настраивать любые устройства, в том числе автосигнализации;
- более упрощенный алгоритм подключения и работы дополнительного оборудования и систем, установленных в автомобиле;
- возможность одновременной передачи и получения цифровой информации и ее анализа от различных источников;
- снижение величины воздействия внешних помех на работу основных и дополнительных систем;
- более быстрое подключение функции автозапуска противоугонной системы;
- ускорение процесса передачи данных к конкретным устройствам и механизмам машины.
Режимы
Цифровая система может функционировать в нескольких режимах:
- Автономный или фоновый. При его активации все системы выключены, но на КАН интерфейс подается питание. Значение напряжения достаточно низкое, поэтому такой режим работы не позволит разрядить АКБ.
- Режим пуска. Он работает, когда водитель устанавливает ключ в замок и прокручивает его в положение зажигания либо кликает по кнопке Старт/Стоп. Производится включение функции стабилизации питания. Напряжение начинает поступать на датчики и регуляторы.
- Активный режим функционирования. При его включении обмен информации начинает происходить между всеми датчиками и регуляторами. Когда активирован активный режим, значение потребления энергии может возрасти до 85 мА.
- Режим отключения либо засыпания. При остановке мотора все датчики и системы, подключенные к интерфейсу КАН, перестают работать. Производится их отключение от электросети машины.
Характеристики
Отдельно следует сказать об основных характеристиках скорости работы интерфейса:
- общая величина скорости передачи данных с информацией составляет 1 мб/с;
- при отправке информации между микропроцессорными устройствами этот показатель составит 500 кб/с;
- скорость получения данных к автомобильной системе «Комфорт» составляет 100 кб/с.
Расширенный кадр CAN
Расширенный кадр сообщения CAN использует 29-битный идентификатор вместе с несколькими дополнительными битами.
Расширенное сообщение имеет заменяющий бит удаленного запроса (SRR) после 11-битного идентификатора, который действует как заполнитель для сохранения той же структуры, что и стандартный CAN. На этот раз расширение идентификатора (IDE) должно быть рецессивным, что указывает на то, что за ним следует расширенный идентификатор. Бит RTR находится после 18-битного идентификатора, за ним следует второй резервный бит r1. Остальная часть сообщения остается прежней.
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
1 ISO11898-2 или CAN-High Speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.
В этом случае уровни на шине CAN выглядят так:
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбит\с и выше. (Но могут быть исключения) .
2 ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбит\с.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий. Подробнее в нашей статье о FT-CAN – ссылка.
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети Салон\Комфорт\Мультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
Принципы работы CAN-шины
Сама по себе CAN шина – это микро чип, обеспечивающий всю работу программной электроники по 2 проводам CAN_H (Сan-High) / CAN_L (Can-Low) с высокой передачей данных. По каждому из провода передается больше сотни различных управляющих сигналов одновременно, коммутируя между собой различные устройства и контролеры в автомобиле, но и тут предел устройства не ограничивается, при необходимости увеличения потока данных, сигнал может быть усилен до необходимого для этого уровня.
Функционал технологии CAN-шины:
- Фоновый режим – в момент выключенной системы, на микро чип CAN-шины продолжает питание, но это не страшно, уровень потребления электричества в фоновом режиме не высок примерно 2Ma – 3Ma доли миллиампер.
- Старт системы – в момент поворота ключа или нажатия на кнопку «STATR» система оживает, включая при этом режим стабилизации питания с блоков или поступающие на различные управляющие автомобилем датчики.
- Работа в обычном режиме – автомобильные контроллеры обмениваются между собой нужной для автомобиля и водителя информацией, например — диагностической или текущей, при этом уровень потребления питания на пиковых нагрузках может возрасти до «85 Ma» миллиампер.
- Режим сна CAN модуля – как только прекращается эксплуатация автомобиля различные датчики «CAN-шины» системы отсоединяются от электрической сети и переходят в режим спячки до следующего запуска.
Потенциальные проблемы
Так как шина находится в связи с большим количеством элементов, то некорректная работа способна приводить к негативным результатам эксплуатации. Это может сказаться не только на работоспособности авто, но и на безопасности вождения.
Сообщать о неисправности система может косвенными признаками
Водителям стоит на нее обратить внимание, в следующих случаях:
- загорелся индикатор Check Engine;
- беспричинно практически одновременно бортовой щиток засветился несколькими иконками, например, стояночный тормоз, подушки безопасности, высокое давление смазки и пр.
- считывание информации на приборной доске стало невозможным, так как не выводится информация о температуре охлаждения, уровне топлива и пр.
Необходимо заняться обязательным более точным тестирование. Квалифицированно его смогут провести на станции техобслуживания, потому что автосервисы оснащены профессиональным оборудованием.