Синхронные электродвигатели. работа и применение. особенности
Содержание:
- Режимы работы
- Разновидности движков
- Устройство
- Принципы работы
- Конструктивные особенности
- Трехфазный асинхронный двигатель с фазным ротором
- Схема запуска двигателя и его регулировка
- Вентильно-индукторный двигатель
- Преимущества и недостатки
- Принцип действия [ править | править код ]
- Принцип действия двигателя постоянного тока — Почему он вращается?
Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.

Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
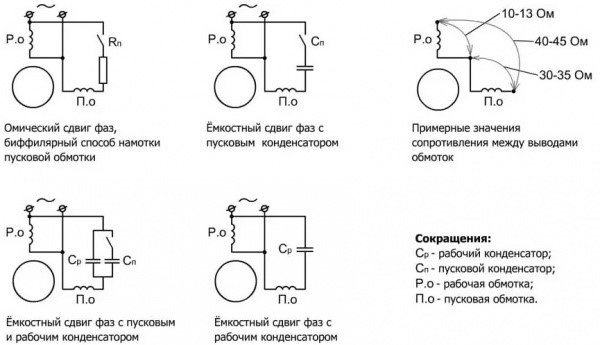
Варианты устройства синхронных двигателей
Разновидности роторов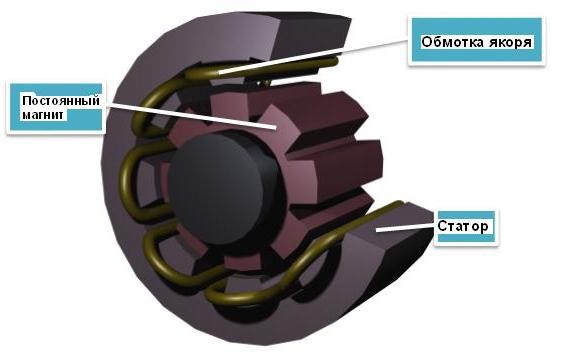
Принцип работы ротора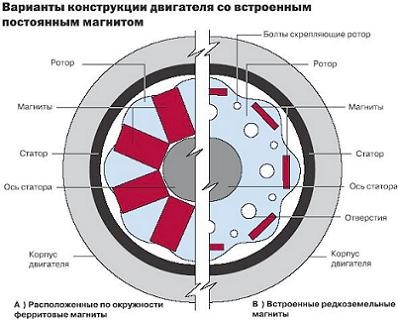
Один из вариантов конструкции двигателя
Ротор с постоянными магнитами
Гистерезисный движок

Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.

Классический движок с индуктором
Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения
Для этой цели делаются специальные движки, называемые синхронными компенсаторами
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.

Движки-компенсаторы на подстанции
Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Устройство
устройство
Электродвигатель на постоянных магнитах не сильно отличается по виду конструкции.
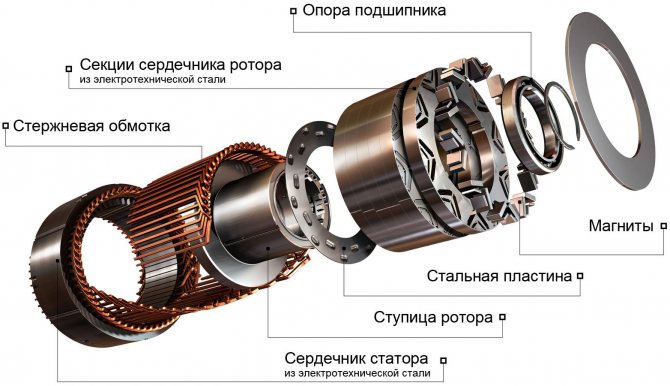
При этом, можно выделить следующие основные элементы:
- Снаружи используется электротехническая сталь, из которой изготавливается сердечник статора.
- Затем идет стержневая обмотка.
- Ступица ротора и за ней специальная пластина.
- Затем, изготовленные из электротехнической стали, секции редечника ротора.
- Постоянные магниты являются частью ротора.
- Конструкцию завершает опорный подшипник.
Как любой вращающийся электродвигатель, рассматриваемый вариант исполнения состоит из неподвижного статора и подвижного ротора, которые при подаче электроэнергии взаимодействую между собой. Отличие рассматриваемого варианта исполнения можно назвать наличие ротора, в конструкцию которого включены магниты постоянного типа.
При изготовлении статора, создается конструкция, состоящая из сердечника и обмотки. Остальные элементы являются вспомогательными и служат исключительно для обеспечения наилучших условий для вращения статора.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор. Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
https://youtube.com/watch?v=hU9krurbi0c
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.

Чем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Трехфазный асинхронный двигатель с фазным ротором
До широкого распространения частотных преобразователей асинхронные двигатели средней и большой мощности делали с фазным ротором. Трехфазные асинхронные двигатели с фазным ротором (АДФР) обычно применяли в устройствах с тяжелыми условиями пуска, например в качестве крановых двигателей переменного тока, или же для привода устройств, требующих плавного регулирования частоты вращения.
Конструкция АДФР
Фазный ротор
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в “звезду”, а начала подключают к контактным кольцам, изолированным друг от друга и от вала. Через щетки к контактным кольцам обычно присоединяется трехфазный пусковой или регулировочный реостат. Асинхронные двигатели с фазным ротором имеют более сложную конструкцию, чем у двигателей с короткозамкнутым ротором, однако обладают лучшими пусковыми и регулировочными свойствами.
Фазный ротор
Статор АДФР
Статор асинхронного двигателя с фазным ротором по конструкции не отличается от статора асинхронного двигателя с короткозамкнутым ротором.
Обозначение выводов вторичных обмоток трехфазного АДФР
Обозначение выводов обмоток ротора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | K1 | K2 |
| вторая фаза | L1 | L2 |
| третья фаза | M1 | M2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | K | |
| вторая фаза | L | |
| третья фаза | M | |
| точка звезды (нулевая точка) | Q | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | K | |
| второй вывод | L | |
| третий вывод | M |
Обозначение выводов обмоток ротора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода |
|---|---|
| Соединение звездой (число выводов 3 или 4) | |
| первая фаза | Р1 |
| вторая фаза | Р2 |
| третья фаза | Р3 |
| нулевая точка | |
| Соединение треугольником (число выводов 3) | |
| первый вывод | Р1 |
| второй вывод | Р2 |
| третий вывод | Р3 |
Примечание: Контактные кольца роторов асинхронных двигателей обозначают так же, как присоединенные к ним выводы обмотки ротора, при этом расположение колец должно быть в порядке цифр, указанных в таблице, а кольцо 1 должно быть наиболее удаленным от обмотки ротора. Обозначение самих колец буквами необязательно.
Пуск АДФР
Пуск двигателей с фазным ротором производится с помощью пускового реостата в цепи ротора.
Применяются проволочные и жидкостные реостаты.
Металлические реостаты являются ступенчатыми, и переключение с одной ступени на другую осуществляется либо вручную с помощью рукоятки контроллера, существенным элементом которого является вал с укрепленными на нем контактами, либо же автоматически с помощью контакторов или контроллера с электрическим приводом.
Жидкостный реостат представляет собой сосуд с электролитом, в котором опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов .
Для повышения КПД и снижения износа щеток некоторые АДФР содержат специальное устройство (короткозамкнутый механизм), которое после запуска поднимает щетки и замыкает кольца.
При реостатном пуске достигаются благоприятные пусковые характеристики, так как высокие значения моментов достигаются при невысоких значениях пусковых токов. В настоящее время АДФР заменяются комбинацией асинхронного электродвигателя с короткозамкнутым ротором и частотным преобразователем.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
ГОСТ 26772-85 Машины электрические вращающиеся. Обозначение выводов и направление вращения.
А.И.Вольдек. Электрические машины. Учебник для студентов высш. техн. заведений. изд. 2-е, перераб. и доп.-Ленинград: Энергия, 1974.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Вентильно-индукторный двигатель

Можно сказать, что все вентильные электромоторы являются индукторными. В той или иной степени принцип индукции закладывается в синхронный и асинхронный агрегаты. Но есть также модели, в которых индукция способствует самонамагничиванию. Иначе эту машину можно назвать самовозбуждающейся. В традиционном исполнении вентильно-индукторный двигатель этого типа имеет простую конструкцию, питается от однополярных импульсов тока и работает с теми же датчиками ротора. Однако из-за нюансов энергоснабжения его нельзя подключать напрямую к сети. В итоге требуется введение в инфраструктуру специальных преобразователей.
С другой стороны, в данной конструкции присутствуют практически все достоинства синхронных агрегатов. Самым явным из них является широкий спектр частот вращения. Например, вентильно-реактивный двигатель с возможностью самовозбуждения способен выдавать порядка 100 тыс. оборотов. Это уже быстроходные электродвигатели, для которых используются комплектующие высокой степени прочности.
Преимущества и недостатки
Синхронный электродвигатель имеет сложнее структуру, чем асинхронный, но обладает некоторыми достоинствами.
Главным положительным качеством данных агрегатов является способность поддерживать оптимальный режим реактивной энергии. Из-за автоматического регулирования силы тока двигателя, он работает, не употребляя, не давая реактивную энергию, значение коэффициента мощности равняется 1. Если нужна реактивная энергия, она будет производиться синхронным мотором.
Данным двигателям не страшны перебои в сети, которой равен их максимальный момент. А значение критического момента равно квадрату напряжения.
Агрегат выдерживает большую перегрузку, которую можно еще увеличить автоматически повышением тока при необходимости непродолжительной нагрузки на вал. Он имеет постоянную скорость вращения независимо от нагрузки.
Трехфазный синхронный двигатель дороже обычного асинхронного из-за сложного механизма и особого устройства.
Еще недостатком оказывается надобность в постоянном источнике энергии, функции которого выполняет выпрямитель или специализированный возбудитель.
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Принцип действия двигателя постоянного тока — Почему он вращается?
Двигатель постоянного тока — это машина которая преобразует электрическую энергию в механическую. То есть, потребляя для своего вращения электрический ток, она приводит во вращение различные устройства. Это могут быть водяной или воздушный насос, стиральная машина или кофемолка. Электродвигателем постоянного тока, разумеется, такой двигатель называется потому, что для его питания используется постоянный электроток.
Рассмотреть принцип действия двигателя постоянного тока удобнее всего на небольшой модели. Поскольку, с одной стороны, у модели принцип работы тот же что и у большого двигателя. А с другой стороны, модель рассматривать удобнее. Потому как она маленькая, со всех сторон для взгляда открыта и деталей на ней меньше.
Модель двигателя постоянного тока состоит из ротора и статора. Ротор — это подвижная часть двигателя. Статор — неподвижная (статичная) часть. В данном случае статор двигателя является индуктором, а ротор якорем. То есть, ток питания сети протекает в роторе.
Главной частью статора является магнит. Так как у мы рассматриваем самую простейшую модель двигателя, магнит постоянный и всего один. Магнит находится в верхней части модели. К двум полюсам магнита присоединяются две железные пластины. Пластины присоединяются таким образом, что они образуют с двух сторон модели двигателя два полюса — северный и южный. То есть, пластины служат продолжением полюсов магнита. Между полюсами находится ротор двигателя.
На ротор наматывается катушка из медного провода. Два вывода катушки подсоединяются к двум контактным пластинкам-ламелям. Эти пластинки имеют полусогнутую форму и располагаются на цилиндре. Причем, цилиндр является изолятором. То есть, обе пластинки изолированны друг от друга. Цилиндр с пластинками является коллектором двигателя постоянного тока. Потому подобные виды двигателей постоянного тока называются коллекторными. Обычно под коллектором понимается устройство что-либо собирающее. Данный коллектор закрепляется на одной оси с ротором. Иначе говоря, при вращении ротора, вращается также и коллектор.
С ламелями соприкасаются пружинные щетки. В свою очередь, с щетками соединены контактные площадки, на которые подается питание постоянным током. В результате, когда на контакты подается питание, ротор начинает вращаться. То есть, при подключении питания, по катушке ротора начинает течь постоянный ток. Иначе говоря, ротор становится электромагнитом. У ротора появляются два полюса, так же как и у статора. Соответственно, магнитные полюса статора притягивают противоположные полюса ротора. Ротор разворачивается становится горизонтально. Вместе с ротором поворачивается и коллектор. В этом положении щетки не прикасаются к пластинам и ток перестает течь по обмотке ротора. То есть, ротор перестает быть электромагнитом.
Разумеется, движение ротора начинает замедлятся. Однако, по инерции ротор всё ещё вращается. И за это время пластины успевают повернуться и прикоснуться к противоположным контактам источника питания. Благодаря этому ток начинает течь по катушке ротора в противоположном направлении. То есть, ротор опять стал электромагнитом, но полюса у него поменялись на противоположные. Ротор опять разворачивается и цикл повторяется снова и снова. Таким образом и работает простейший двигатель постоянного тока.
Несомненно, мы рассмотрели самую простую модель электродвигателя. Однако, на этой модели очень хорошо виден сам принцип работы двигателя постоянного тока. Безусловно, обычно двигатели постоянного тока устроены сложнее. К примеру, часто их статор состоит из двух магнитов, а ротор выполнен трехполюсным. А также, постоянные магниты на статоре могут быть заменены или дополнены электромагнитами. Двигатели с таким устройством работают намного более надежно. Обычно чем мощнее двигатель, тем сложнее его устройство. Очень сильно работа двигателя постоянного тока зависит от подключения его обмоток. Причем, существует несколько способов их подключения. Стоит отметить также то, что, кроме коллекторных двигателей, существуют и бесколлекторные электродвигатели постоянного тока.
Для вашего удобства подборка публикаций